
Make things EASY!!!
About me:
I’m a PhD student in Khoury Collge of Computer Science at Northeastern University, where I am advised by Prof. Platt in The Helping Hands Lab and Prof. Walters in the Geometric Learning Lab.
I am super interested in machine learning, reinforcement learning, and their applications in robotics, image processing, point cloud analyses, and other related fields.
Stay fool, stay hungry and stay fresh.
News
01/2025: Our work Match Policy: A Simple Pipeline from Point Cloud Registration to Manipulation Policies is accepted at ICRA 2025, Atlanta, USA.
- 11/2024: Our work Equivariant Diffusion Policy is awarded as an Outstanding Paper Finalist at CoRL 2024, Munich, Germany.
- 11/2024: Happy to attend and talk at Robot Learning Symposium @ TUDA.
- 09/2024: Starting fall-semester internship in Amazon Robotics, BOS12, North Reading, MA.
- 09/2024: Our work IMAGINATION POLICY: Using Generative Point Cloud Models for Learning Manipulation Policies is accepted at CoRL 2024.
- 09/2024: Our work Equivariant Diffusion Policy is accepted at CoRL 2024.
- 09/2024: Our work OrbitGrasp: SE(3)-Equivariant Grasp Learning is accepted at CoRL 2024.
- 09/2024: Our work ThinkGrasp: A Vision-Language System for Strategic Part Grasping in Clutter is accepted at CoRL 2024.
01/2024: Our work Fourier Transporter: Bi-Equivariant Robotic Manipulation in 3D is accepted at ICLR-2024.
- 12/2023: Our work Leveraging Pick and Place Symmetries is accepted at IJRR-2024.
- 09/2023: Starting fall-semester internship in Boston Dynamics AI Institute.
- 07/2023: Our work Edge Grasp Network is presented at RSS 2023 Workshop on Symmetries in Robot Learning.
01/2023: Our work Edge Grasp Network: A Graph-Based SE(3)-invariant Approach to Grasp Detection is accepted at ICRA 2023.
- 11/2022: Our work Edge Grasp Network is accepted at Sim to Real workshop of CoRL 2022.
- 05/2022: Spotlight presentation of Equivariant Transporter Network (Best Paper Award Finalists) on Scaling Robot Learning Workshop of ICRA-2022.
04/2022: Our work on Equivariant Transporter Network is accepted at RSS 2022.
- 10/2021: Our work on GASCN: Graph Attention Shape Completion Network is accepted at 3DV 2021.
Selected Publications
` `
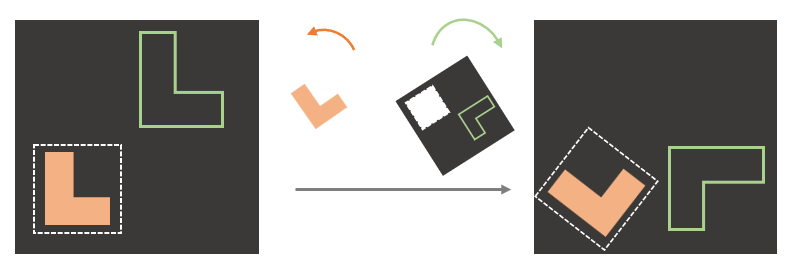
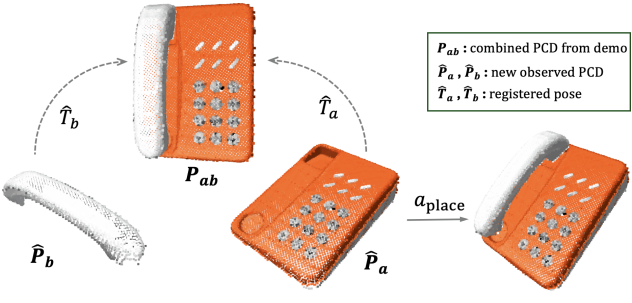 MATCH POLICY: A Simple Pipeline from Point Cloud Registration to Manipulation Policies
MATCH POLICY: A Simple Pipeline from Point Cloud Registration to Manipulation Policies
Haojie Huang, Haotian Liu, Dian Wang, Robin Walter*, Robert Platt*
International Conference on Robotics and Automation 2025 (ICRA 2025)
PDF Webpage ` `
` `
` `
` `
` `
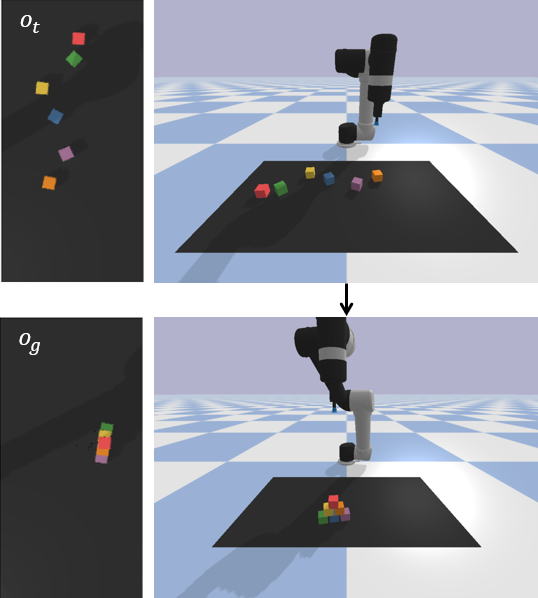
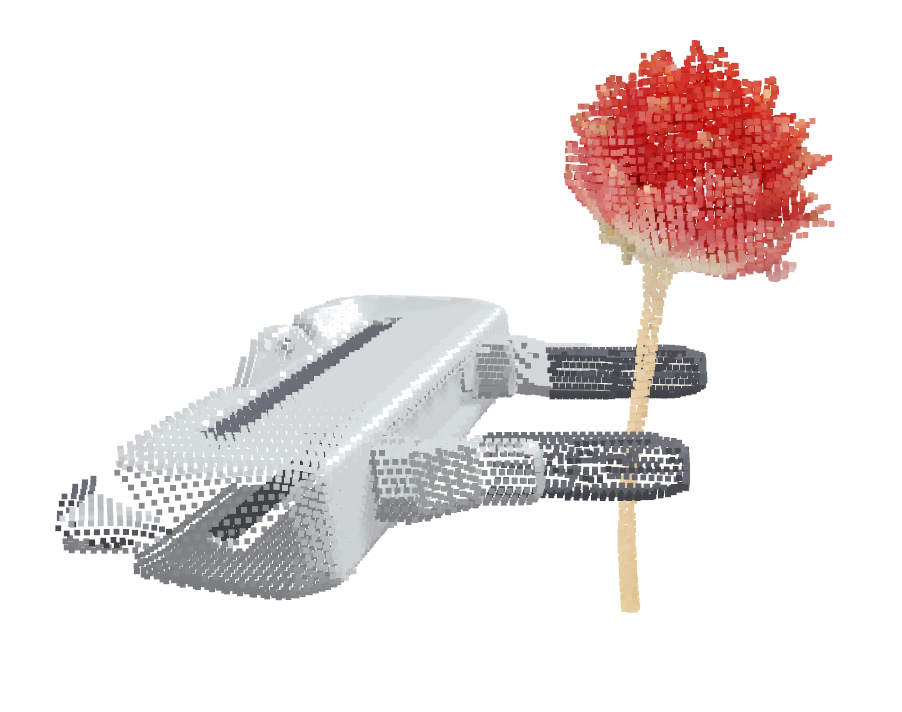 IMAGINATION POLICY: Using Generative Point Cloud Models for Learning Manipulation Policies
IMAGINATION POLICY: Using Generative Point Cloud Models for Learning Manipulation Policies
Haojie Huang, Karl Schmeckpeper, Dian Wang, Ondrej Biza, Yaoyao Qian, Haotian Liu, Mingxi Jia, Robert Platt, Robin Walters
Conference on Robot Learning (CoRL 2024)
PDF Webpage Code ` `
` `
` `
` `
` `
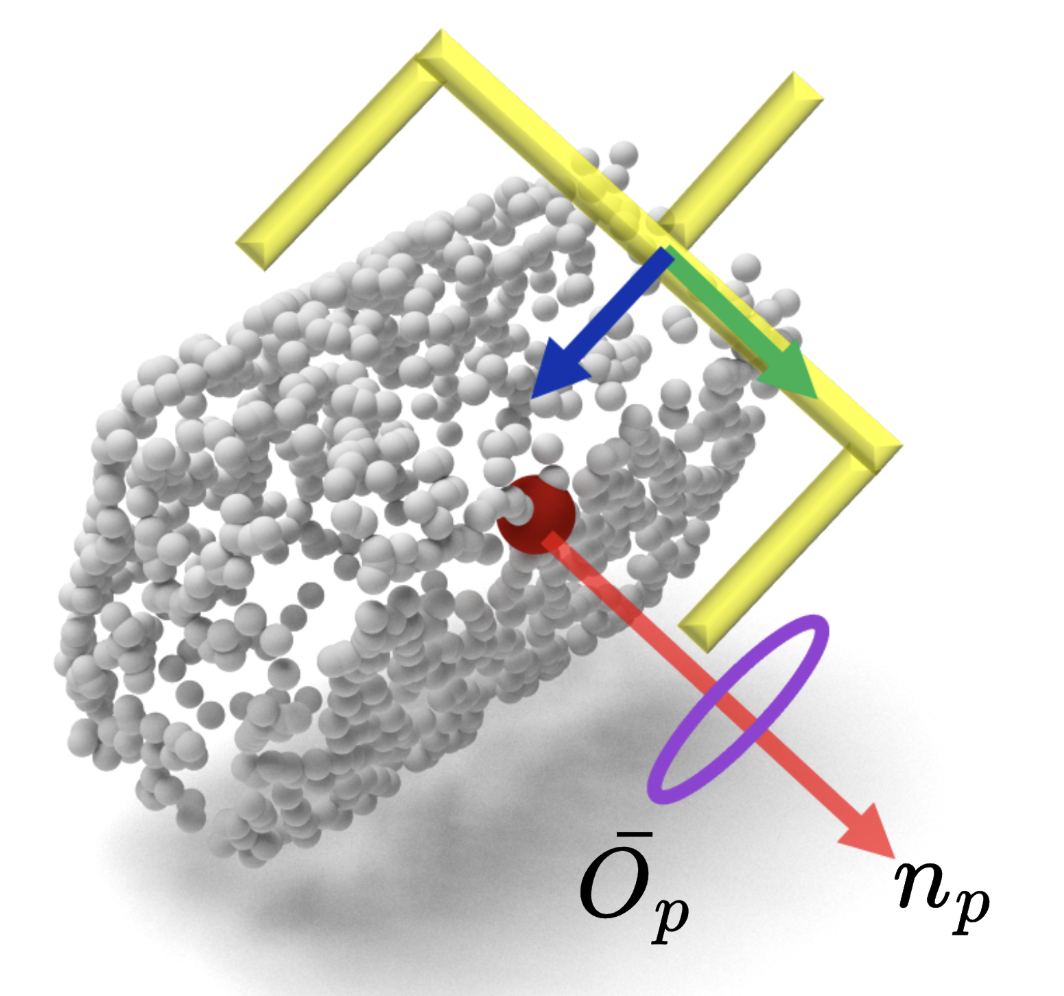 OrbitGrasp: SE(3)-Equivariant Grasp Learning
OrbitGrasp: SE(3)-Equivariant Grasp Learning
Boce Hu, Xupeng Zhu*, Dian Wang*, Zihao Dong*, Haojie Huang*, Chenghao Wang*, Robin Walters, Robert Platt
Conference on Robot Learning (CoRL 2024)
PDF Webpage Code ` `
` `
` `
` `
` `
 Equivariant Diffusion Policy
Equivariant Diffusion Policy
Dian Wang, Stephen Hart, David Surovik, Tarik Kelestemur, Haojie Huang, Haibo Zhao, Mark Yeatman, Jiuguang Wang, Robin Walters, Robert Platt
Outstanding Paper Award Finalist - Conference on Robot Learning (CoRL 2024)
PDF Webpage Code ` `
` `
` `
` `
` `
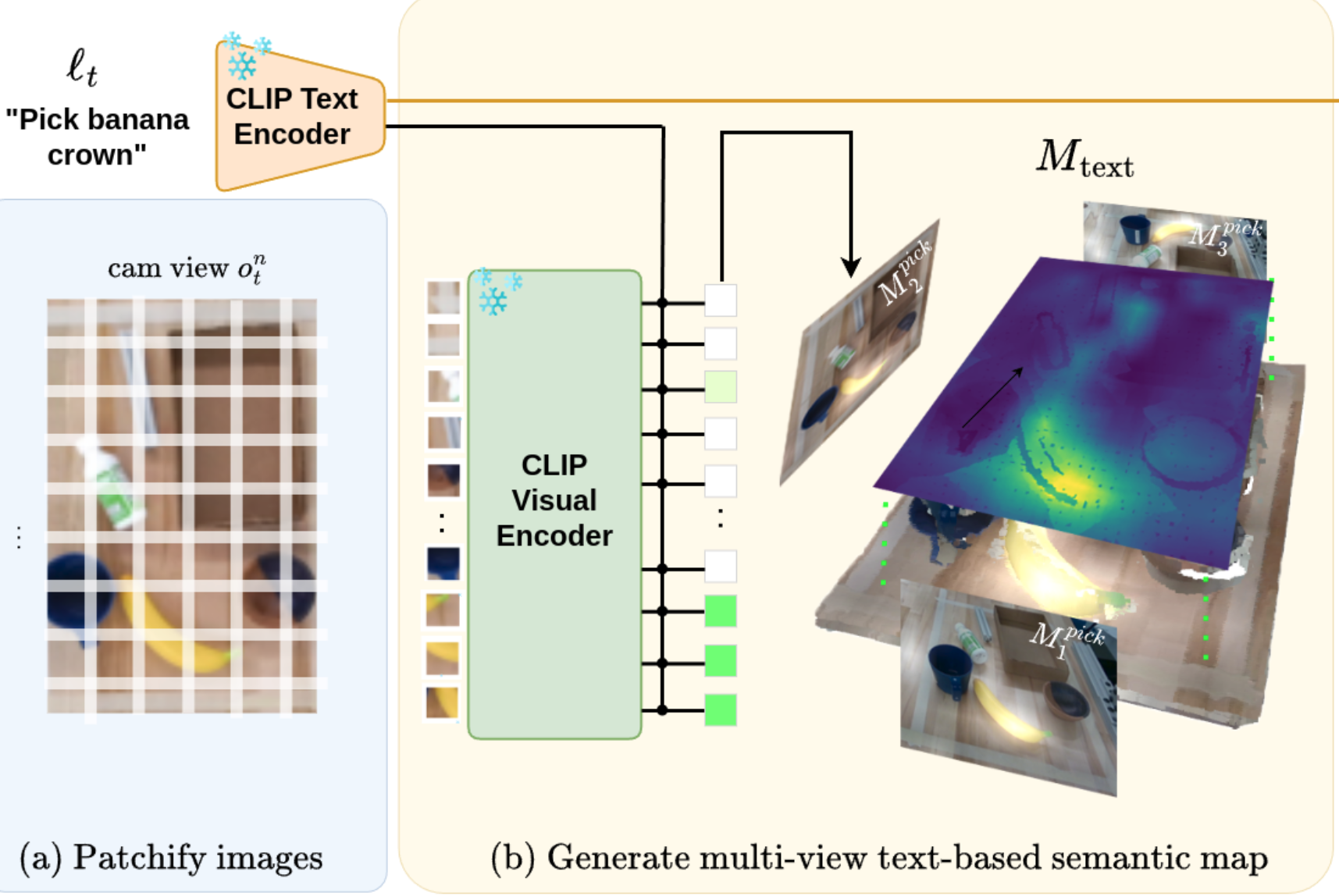 Open-vocabulary Pick and Place via Patch-level Semantic Maps
Open-vocabulary Pick and Place via Patch-level Semantic Maps
Mingxi Jia*, Haojie Huang*, Zhewen Zhang, Chenghao Wang, Linfeng Zhao, Dian Wang, Jason Xinyu Liu, Robin Walters, Robert Platt, Stefanie Tellex
Arxiv Preprint (2024)
PDF ` `
` `
` `
` `
` `
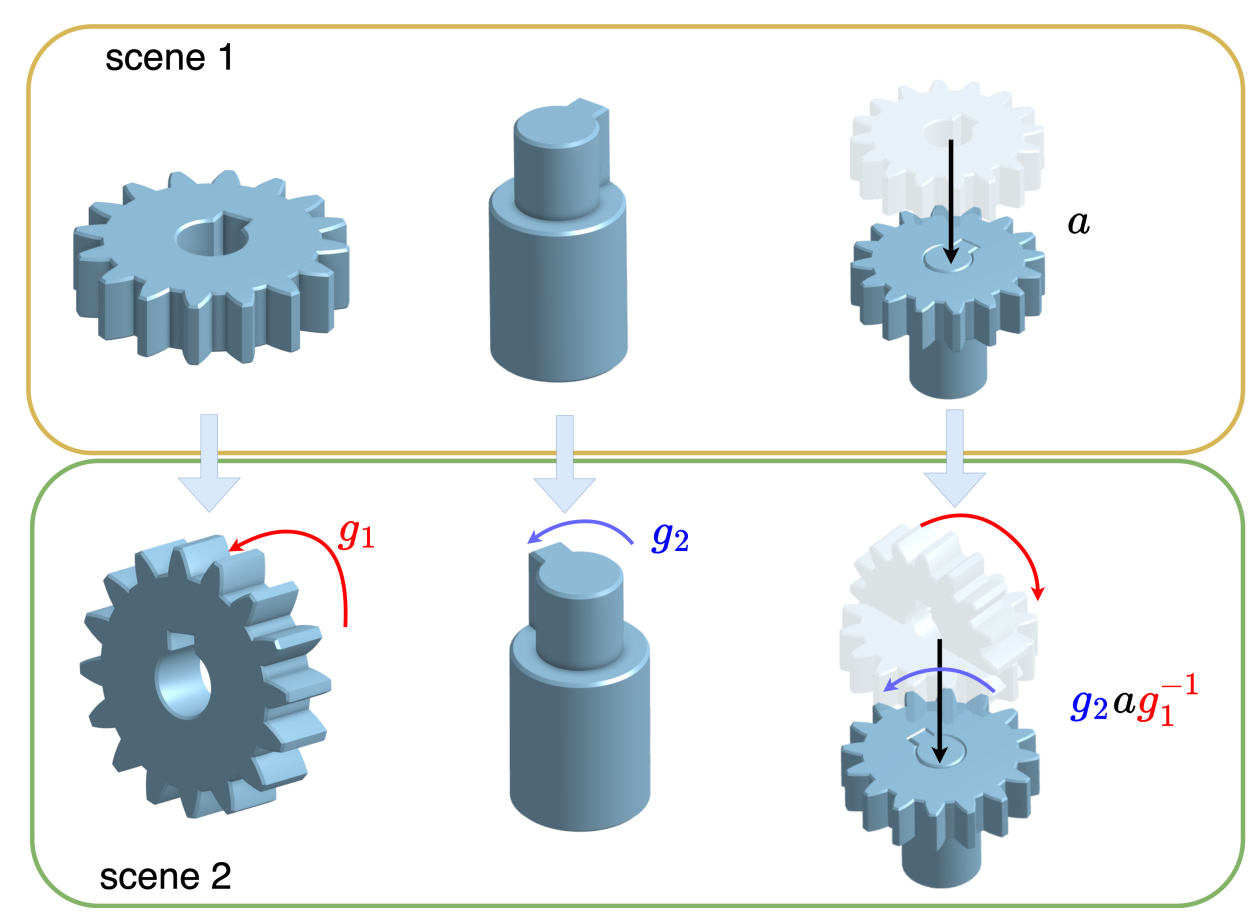 Fourier Transporter: Bi-Equivariant Robotic Manipulation in 3D
Fourier Transporter: Bi-Equivariant Robotic Manipulation in 3D
Haojie Huang, Owen Howell, Dian Wang, Xupeng Zhu, Robert Platt, Robin Walters
The International Conference on Learning Representations 2024 (ICLR 2024)
PDF Code (coming oon) Webpage ` `
` `
` `
` `
` `
 Leveraging Symmetries in Pick and Place
Leveraging Symmetries in Pick and Place
Haojie Huang, Dian Wang, Arsh Tangri, Robin Walters, Robert Platt
The International Journal of Robotics Research (Volume 43, Issue 4, 2024)
PDF Code Webpage: Coming soon ` `
` `
` `
` `
` `
` `
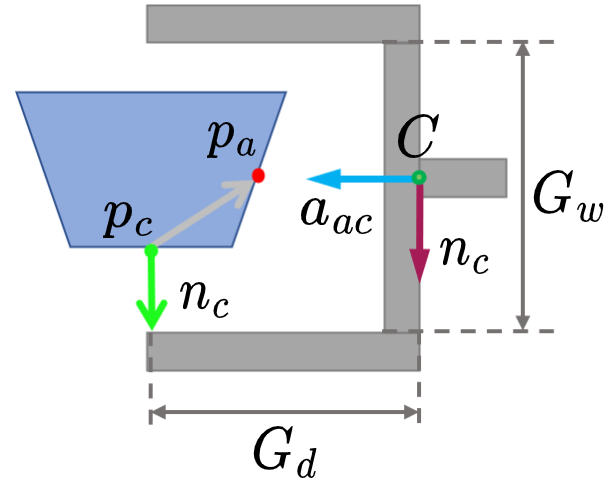 Edge Grasp Network: Graph-Based SE(3)-invariant Approach to Grasp Detection
Edge Grasp Network: Graph-Based SE(3)-invariant Approach to Grasp Detection
Haojie Huang, Dian Wang, Xupeng Zhu, Robin Walters, Robert Platt
International Conference on Robotics and Automation 2023 (ICRA 2023)
PDF Code Webpage ` `
` `
` `
` `
 Equivariant Transporter Network
Equivariant Transporter Network
Haojie Huang, Dian Wang, Robin Walters, Robert Platt
Robotics: Science and Systems 2022 (RSS 2022)
PDF Code Webpage ` `
` `
` `
` `
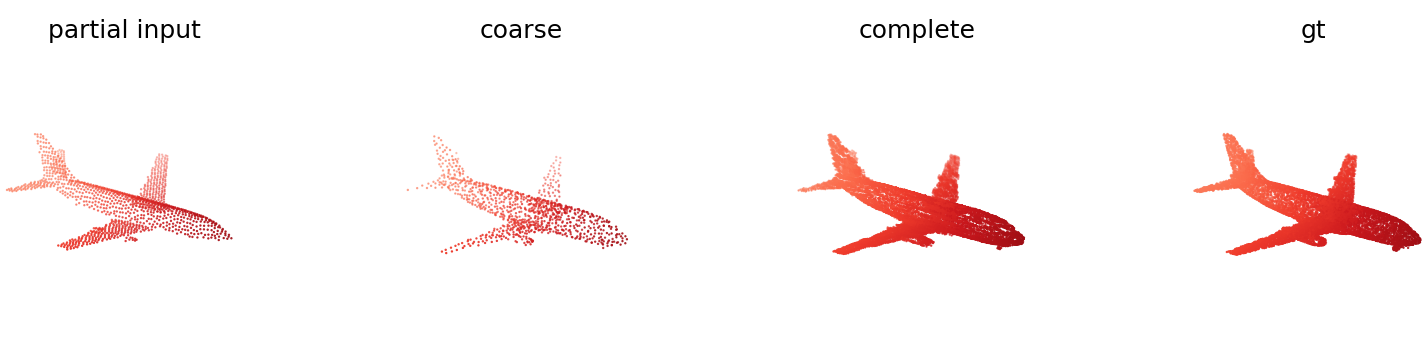 Graph Attention Shape Completion Network
Graph Attention Shape Completion Network
Haojie Huang, Ziyi Yang, Robert Platt
2021 International Conference on 3D Vision (3DV 2021)
PDF Webpage ` `
` `
Education
- (2021 ~ Present) PhD, Computer Science, Northeastern University, Boston, United States
- (2018 ~ 2021) M.S., Robotics, Northeastern University, Boston, United States
- (2013 ~ 2017) Bachelor, Mechanical Engineering, Shandong University, Jinan, China
Award
Best Paper Award Finalist on Scaling Robot Learning Workshop of ICRA-2022
Outstanding Paper Award Finalist on Conference on Robot Learning 2024